已知集合,A=x|x≤1,B=x|x≥a,则A∪B=R,实数a的取值范围是().
参考答案:a≤1
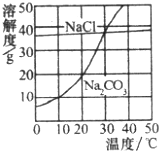
如图所示为氯化钠、碳酸钠(俗称纯碱)在水中的溶解度曲线.生活在盐湖附近的人们习惯“夏天晒盐,冬天捞碱”.请你解释“夏天晒盐,冬天捞碱”的原因.
办理人民币单位银行结算账户通存通兑业务适用“有偿服务”原则,必须按照中间业务价格管理相关规定向委托人收取相应费用。