(1)设P的坐标为(x,y),则Q(-1,y),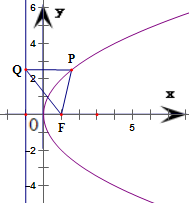 可得=(x+1,0),
可得=(x+1,0),
=(2,-y),=(x-1,y),=(-2,y),
∵•=•,
∴(x+1)•2=(x-1)(-2)+y2,化简得y2=4x,
即动点P的轨迹C的方程为y2=4x.
(2)设l的方程为x=ty+m,过点M(m,0)(m>0)的直线l与
曲线C的交点为A(x1,y1),B(x2,y2).
由消去x,得y2-4ty-4m=0.…(*)
则y1、y2是方程(*)的两根.
∴△=16(t2+m)>0,且①
又∵=(x1-1,y1),=(x2-1,y2),
∴•<0,可得(x1-1)(x2-1)+y1y2<0,即x1x2-(x1-x2)+1+y1y2<0…②
由于x1x2=•,代入不等式②可得:•+y1y2-(+)+1<0,
化简得+y1y2-[(y1+y2)2-2y1y2]+1<0…③
由①式,化简不等式③得m2-6m+1<4t2,…④
对任意实数t,不等式4t2≥0恒成立,
∴不等式④对于一切t成立等价于m2-6m+1<0,
解之得3-2<m<3+2.
由此可得:存在正数m,对于过点M(m,0),且与曲线C有两个交点A,B的任一直线,
都有•<0,且m的取值范围是(3-2,3+2).