机器人的正运动学
参考答案:
当已知所有的关节变量时,可用正运动学来确定机器人末端手的位姿。
支气管呼吸音是动物呼吸时,气流通过喉部的声门裂隙产生的漩涡运动以及气流在气管、支气管形成涡流所产生的声音,正常时,哪种动物肺部听不到此声音?()
A.犬
B.牛
C.羊
D.马
E.猫
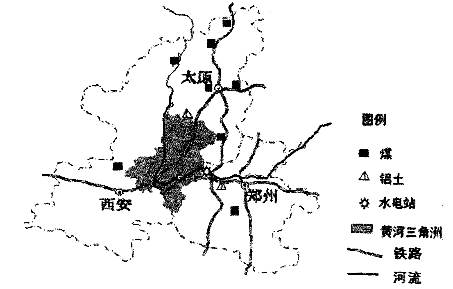
“黄河金三角地区”土地面积为5.8万平方公里,人口1700万,是国家炼铝工业的重要生产基地。读下图,回答第问题。
小题1:该区发展炼铝工业的优势条件是( )
①环境优美
②能源丰富
③内河航运发达
④有重要铁路经过
A.①②
B.①③
C.②④
D.③④小题2:下列工业部门中,炼铝工业属于哪种指向型( )
A.原料指向型
B.市场指向型
C.动力指向型
D.技术指向型