问题
问答题
某学生在做“研究杠杆平衡条件”的实验中,进行了如下实验步骤:
A、把杠杆的中点支在支架上;
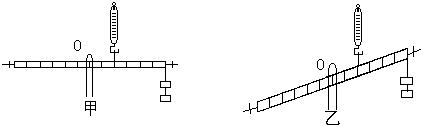
B、照图所示那样把钩码挂在杠杆两边,改变钩码的位置,使杠杆在水平位置平衡;
C、记下两边钩码重力,并用尺量出它们的力臂,分别填入实验数据表格内;
D、改变力和力臂的数值,做三次实验.
E、求出各次实验中动力乘动力臂和阻力乘阻力臂的数值.
试回答下列问题:
(1)该学生在______步骤前漏掉了一个重要步骤?这一步要做什么?答:______.
(2)如果实验正确无误,本实验所得的结论是什么?答:______.
(3)做实验时,图中所示的两个状态均表示杠杆已达到平衡.当杠杆由图甲的位置变成图乙的位置时,弹簧秤的示数将______.(填“变大”、“变小”或“不变”)
答案
(1)实验步骤中,把杠杆的中点支在支架上,就进行探究杠杆平衡条件的实验数据的测量,没有考虑杠杆重力对杠杆平衡产生的影响和便于测量力臂,所以B之前漏掉一个重要步骤:调节平衡螺母,使杠杆在水平位置平衡;
(2)如果实验正确无误,分析实验数据,可得结论:
动力×动力臂=阻力×阻力臂,即:F1L1=F2L2.
如图甲,杠杆在水平位置平衡时,砝码由于重力对杠杆产生的力F1的力臂等于支点到力的作用点的距离OA;测力计竖直向上拉力F2,力臂等于支点到力的作用点的距离OB.所以F1×OA=F2×OB.
(3)如图乙,杠杆在乙图位置平衡时,
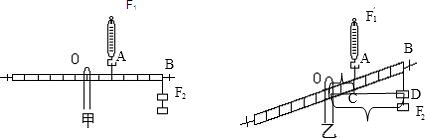
F1′的力臂为OC=OA×cos∠BOD,F2的力臂为OD=OB×cos∠BOD.
所以F1′×OAcos∠BOD=F2×OBcos∠BOD,
所以F1′×OA=F2×OB,
所以F1′=F1,
故弹簧秤的示数将不变.
故答案为:(1)B;调节杠杆两端的平衡螺母使杠杆水平平衡;
(2)杠杆平衡条件是:F1L1=F2L2;
(3)不变