问题
实验题
物理实验小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
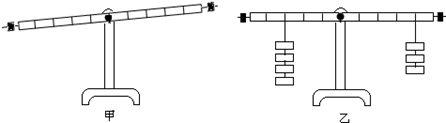
(1)如图甲所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向 (选填“左”或“右”)移动,将杠杆调在水平位置的目的是为了方便测量 .
(2)实验中测得的数据如表所示,表格中漏填的数据为 N
| 实验次数 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中( )(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
答案
(1)右;力臂;(2)1;(3)B
题目分析:(1)杠杆重心左移应将平衡螺母向右调节,直至重心移到支点处;由于力臂是支点到力的作用线的垂直距离,调节杠杆在水平位置平衡时,可以方便的读出力臂;
(2)第三组的阻力为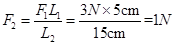
(3)“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向.故选项A、C、D错误,选项B正确.
故答案为:
(1)右;力臂;(2)1;(3)B.
点评:(1)由图知,杠杆左端下倾,说明杠杆的重心在支点左侧,调节平衡螺母应使杠杆重心右移,这一调节过程的目的是为了直接从杠杆上读出力臂;
(2)由前两组可以得到杠杆的平衡条件:动力×动力臂=阻力×阻力臂.第三组已知动力和动力臂、阻力臂,所以可以得到阻力;
(3)从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂.