焊接机器人按用途可分为( )。
A.弧焊机器人
B.点焊机器人
C.直角坐标系机器人
D.圆柱坐标系机器人
E.球坐标系机器人
F.全关节型机器人
参考答案:A,B
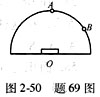
如图2.50所示,一半球真空辐射炉,球心处有一尺寸不大的圆盘形辐射加热元件,加热元件的定向辐射强度和辐射量有()关系。
A.IOA>IOB,qA>qB
B.IOA<IOB,qA<qB
C.IOA=IOB,qA>qB
D.IOA=IOB,qA<qB
饮料生产过程中只有一次灭菌,饮用时人们不再加热处理,因此生产饮料要采取严格的卫生管理措施。饮用的瓶装饮料开盖后,存放时间一般不要超过4 h。