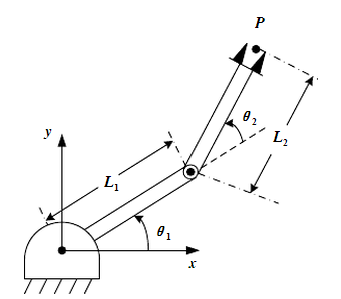
如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x,y},试求其关节旋转变量θ1和θ2.
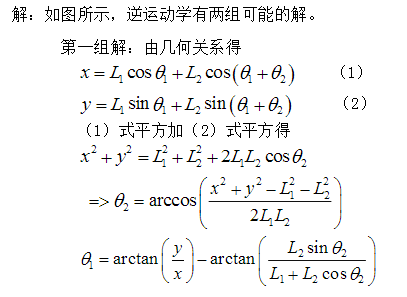
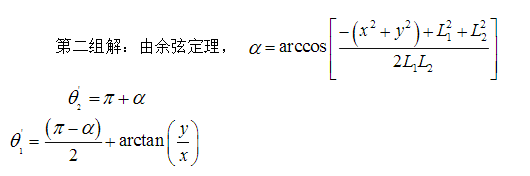
参考答案:
正方形有______条边.它们______边相等,人个角都是______角.
高分子有机化合物受高温作用而导致分子链发生断裂的现象称为()。
A.高温分散
B.高温钝化
C.高温降解
D.高温交联